|
|
Vision-based robot guidance
|
|
|
|
Laser guidance of robots capable of vision and communication
|
This system operates with the environmental model and
comprises a computer-controlled laser. The system directs a laser
beam onto desired positions on the ground and communicates with the
robot when indicating its target position and subsequent checking if
the robot has attained this position. The key idea is to
indicate the numerical coordinates of the target
position by means of projection of a laser light. The robot's
vision system processes the color images in order to detect the
laser light beacon on the ground and evaluate its relative
coordinates. This visual feedback ensures that the robot accurately
follows the indicated positions. It also allows implicit
localization of the robot within the environment: when the
robot has reached its indicated target position and has confirmed
this to the guidance system, an estimate of its coordinates in the
environmental model is known. The communication ability and
updating the environmental model by the guidance system allow us to
use this system as a mediator for multiple robots.
|
 |
|
|
 Movie (mpeg 12 MB) Movie (mpeg 12 MB)
|
|
U.S. Patent 6,629,028
|
|
Japan Patent 3394472
|
|
|
|
Motion control of visually-coupled autonomous vehicles
|
This video presents our experiments with two
visually-coupled omnidirectional mobile robots. The robot's control
system ensures its accurate motion to a given goal. This provides
to track a dynamic target detected and localized by
means of processing the color images from an on-board CCD
camera. The operation of our system is illustrated by an example of
a vision-based towing of the vehicles. One mobile
robot is assigned as a leader and an other - as a follower. A
remote human operator sets goal positions and speed of the leader
within an environmental map shown on the display. During the motion,
the leader's position is depicted on the map, and the operator views
the images gathered by the on-board CCD camera. The follower is
visually-coupled to the leader and moves as a visually-connected
trailer. This system is developed to perform inspection
tasks, e.g. examine an equipment of an electric power
station. It can also be used for delivery operations and
entertainment.
|
 |
|
|
|
Movie (mpeg 27 MB)
|
|
Japan Patent 3394472
|
|

|
|
Driver assistance
|
|
|
|
Planning control profiles to assist in car maneuvers
|
This video illustrates our research work toward driver assistance
and autonomous driving at low speed in constrained traffic
environments. The key idea of our approach is to plan and
parameterize the basic control
profiles of steering angle and speed of the car, in order
to achieve the desired shape of its path within the available
space. The basic control profiles are specified by such relevant
parameters as a duration and a magnitude. In order to achieve the
desired motion, the adequate values of these parameters are computed
according to the actual traffic situation. The obtained control
profiles of steering angle and speed are executed by the
servo-systems. The approach allows to obtain various path shapes and
perform such maneuvers as parking or
U-turn in a typical environment of a parking
lot.
|
 |
|
|
|
Movie (mpeg 18 MB)
|
|
|
|
Automatic parallel parking and returning to traffic
|
The planning and decision architecture allows to perform a
sequence of controlled motions using sensor data
from the car servo-systems and range measurements of the
environment. Appropriate steering and velocity controls are
computed in real time and executed to accomplish the planned
maneuver. The automatic parallel parking algorithm
localizes a sufficient parking place along the roadside, attains a
convenient start location for the car in front of the parking place,
and performs a parallel parking maneuver. Automatic pulling
out involves localizing an available space for the car
motion within the parking place, placing the car at an appropriate
spot at the rear of the parking place, and performing a maneuver to
pull out of the parking place into the traffic lane.
Video Proceedings of the IEEE
International Conference on Robotics and Automation,
Leuven, Belgium, May 16-20, 1998.
|
 |
|
|
|
Movie (mpeg 18 MB)
|
|
|
|
|
Robot control and navigation
|
|
|
|
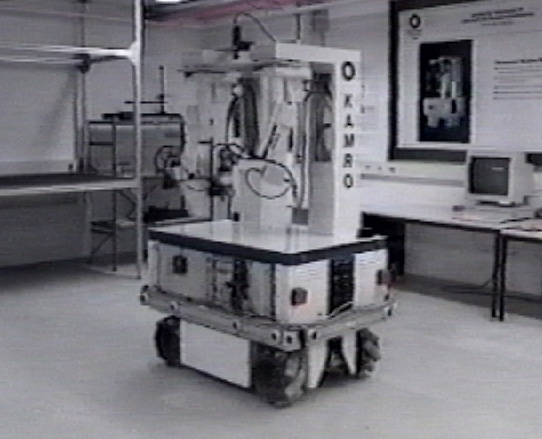
Advanced manipulation capabilities of the autonomous assembly robot
KAMRO
|
The control and navigation system of KAMRO allows it to
follow a planned path and avoid collisions with unknown obstacles.
The reactive control algorithm operates with the preference
functions of the planned global subgoals and the actual
position and orientation of the omnidirectional vehicle. Processing a
range data from the ultrasonic sensors is combined with the preference
functions, that results in the adequate speed and direction of the motion
in order to lead the vehicle to its destination. The PUMA 200 manipulators
of KAMRO are under hybrid position/force control
with a variable structure. The non-linear controller provides to
compensate errors appearing during the assembly operations. The manipulator
is capable to produce desired forces while following a prescribed,
position controlled trajectory.
Video Proceedings of the IEEE International Conference
on Robotics and Automation,
San-Diego, CA, USA, May 8-13, 1994.
|
 |
|
|
|
Movie (mpeg 33 MB)
|
Copyright © 1998-
|