#include <plEKF.h>
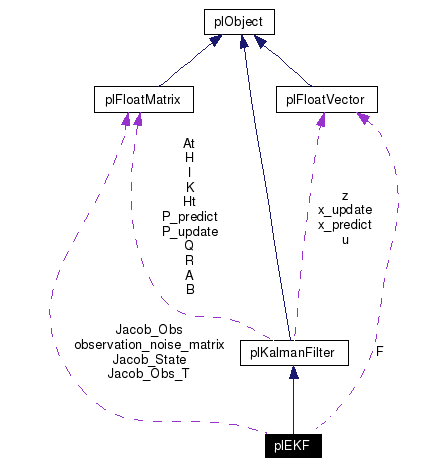
Inheritance diagram for plEKF:
Protected Member Functions | |
| virtual void | update_F_Jacob (const plFloatVector &obs)=0 |
| This virtual method have to update: - F = F( x_update, obs) - Jacob_State = jacob(F, x_update) - Jacob_Obs = jacob(F, obs) . | |
The measurement equation is F(s, obs) = 0
Definition at line 11 of file plEKF.h.
 1.4.1
1.4.1