#include <plBayesianFilter.h>
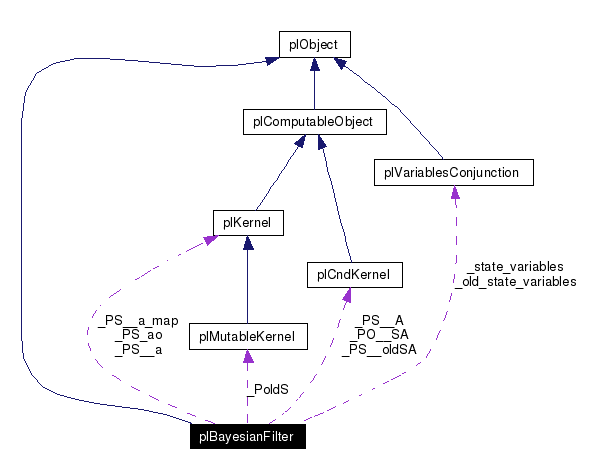
Inheritance diagram for plBayesianFilter:
Public Member Functions | |
| plBayesianFilter (const plKernel &InitialState, const plCndKernel &SystemModel, const plCndKernel &ObservationModel, const plVariablesConjunction &action_vars) | |
| Constuction of a filter with action variables and non Idendity system model: P(S S_ O | A) = P(S_) P(S | S_ A) P(O | S A). | |
| plBayesianFilter (const plKernel &InitialState, const plVariablesConjunction &old_state_vars, const plCndKernel &SystemModel, const plVariablesConjunction &state_vars, const plCndKernel &ObservationModel, const plVariablesConjunction &obs_vars, const plVariablesConjunction &action_vars) | |
| Same as above, but with explicitly giving the variables. | |
| plBayesianFilter (const plKernel &InitialState, const plCndKernel &SystemModel, const plCndKernel &ObservationModel) | |
| Constuction of a filter with no action variables and non Idendity system model: P(S S_ O) = P(S_) P(S | S_) P(O | S). | |
| plBayesianFilter (const plKernel &InitialState, const plVariablesConjunction &old_state_vars, const plCndKernel &SystemModel, const plVariablesConjunction &state_vars, const plCndKernel &ObservationModel, const plVariablesConjunction &obs_vars) | |
| Same as above, but with explicitly giving the variables. | |
| plBayesianFilter (const plKernel &InitialState, const plCndKernel &ObservationModel, const plVariablesConjunction &action_vars) | |
| Constuction of a filter with action variables and Identity system model: P(S O | A) = P(S) P(O | S A). | |
| plBayesianFilter (const plKernel &InitialState, const plCndKernel &ObservationModel) | |
| Constuction of a filter with no action variables and Identity system model: P(S O) = P(S) P(O | S). | |
| ~plBayesianFilter () | |
| Destructor. | |
| void | setAction (const plValues &act) |
| Apply new command. | |
| void | prediction () |
| Exact prediction step P(S | A = a) (or P(S) if no action variables). | |
| void | n_prediction (unsigned long int nsamples) |
| Prediction step P(S | A = a) (or P(S) if no action variables) using 'nsamples' sample points. | |
| void | time_prediction (double time_in_sec) |
| Prediction step P(S | A = a) (or P(S) if no action variables) using for 'time_in_sec' seconds. | |
| void | observation (const plValues &obs) |
| Incorporate new observation and do the update step P(S | O = o A = a) (or P(S | O = o) if no action variables). | |
| void | addMeasurement (const plValues &act, const plValues &obs) |
| Fix the action, incorporate an observation, and apply prediction/update steps. | |
| void | n_addMeasurement (unsigned long int nsamples, const plValues &act, const plValues &obs) |
| Fix the action, compute a prediction using 'nsamples' samples, and incorporate an observation. | |
| void | time_addMeasurement (double time_in_sec, const plValues &act, const plValues &obs) |
| Fix the action, compute a prediction in 'time_in_sec' seconds, and incorporate an observation. | |
| void | addMeasurement (const plValues &obs) |
| Incorporate an observation, and apply prediction/update steps. | |
| void | n_addMeasurement (unsigned long int nsamples, const plValues &obs) |
| Compute a prediction using 'nsamples' samples, and incorporate an observation. | |
| void | time_addMeasurement (double time_in_sec, const plValues &obs) |
| Compute a prediction in 'time_in_sec' seconds, and incorporate an observation. | |
| plKernel | getEstimation () const |
| Returns the current estimated distribution P(S). | |
Definition at line 42 of file plBayesianFilter.h.
 1.4.1
1.4.1